Le scanner laser terrestre en bref
Le scannage laser terrestre est la principale technique de mesure utilisée pour réaliser la modélisation 3D des Tunnels d'Arras. La technologie repose sur un faisceau laser envoyé sur une surface ; le temps de retour du faisceau réfléchi sur la surface est associé avec la direction de ce faisceau pour positionner le point en 3D avec une précision millimétrique.
Comparé aux outils traditionnels de positionnement d'un point unique, le scanner TRIMBLE TX8 est capable d'acquérir jusqu'à un million de points par seconde. En plus des coordonnées 3D d'un point, cet appareil peut associer les couleurs vraies à chaque point ainsi qu'une valeur d'intensité retournée, ceci permettant d'obtenir une haute densité de données colorisées et une texturation réaliste du modèle 3D.

Figure 1. Richard Hemi utilisant un scanner laser terrestre (Trimble TX8) pour acquérir les données 3D de la rue au-dessus des Tunnels (en haut à droite).

Figure 2. Richard Hemi utilisant un scanner laser terrestre (Trimble TX5) pour acquérir un tunnel.

Figure 3. Une capture d'écran des données scanner montrant la haute densité et la résolution des données acquises.
Assemblage et géoréférencement
Tous les scans individuels doivent être assemblés et référencés par rapport à un scan unique. Ceci peut être réalisé en utilisant des points de liaison communs entre des scans successifs sous la forme de cibles sphériques ou en damier. Une alternative pour exécuter l'assemblage consiste à déduire des recouvrements suffisants entre les scans successifs et effectuer un assemblage surface – surface pour lequel le logiciel utilise un algorithme ICP (Iterative Closest Point).
Quand tous les scans ont été assemblés, ils peuvent être géoréférencés dans un système de coordonnées général. Pour cela, un réseau de points fixes de référence (canevas) est mis en place avec des points mesurés dans le système de coordonnées général permettant de positionner le modèle dans le même système que toutes les autres données géographiques. Dans notre cas, la difficulté vient du fait que les travaux sont souterrains et que le réseau de points de référence doit être mis en place depuis la surface à travers des accès extérieurs limités. Un exemple peut être observé sur la Figure 4 ou une cible sphérique est mesurée à la fois par une station totale et un scanner. Un canevas peut être mis en place en utilisant des méthodes GPS ou tachéométriques (station totale).
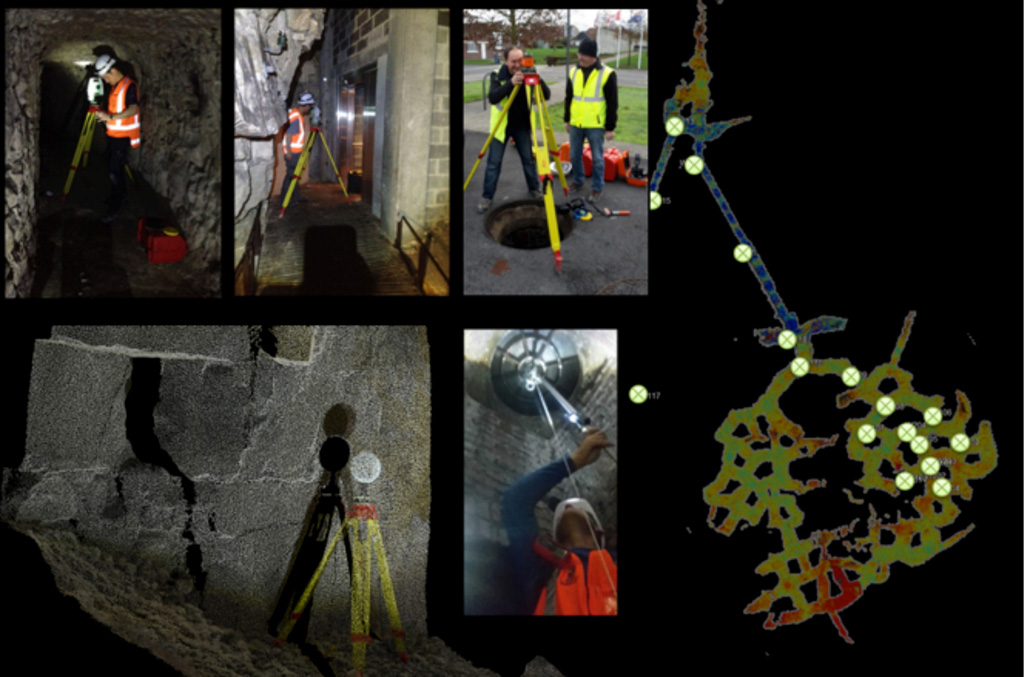
Figure 4. Installation du canevas mettant en évidence les difficultés de mise en place d'un réseau de points souterrain.